Hybrid Assistive Wheechair-Exoskeleton Transformer.
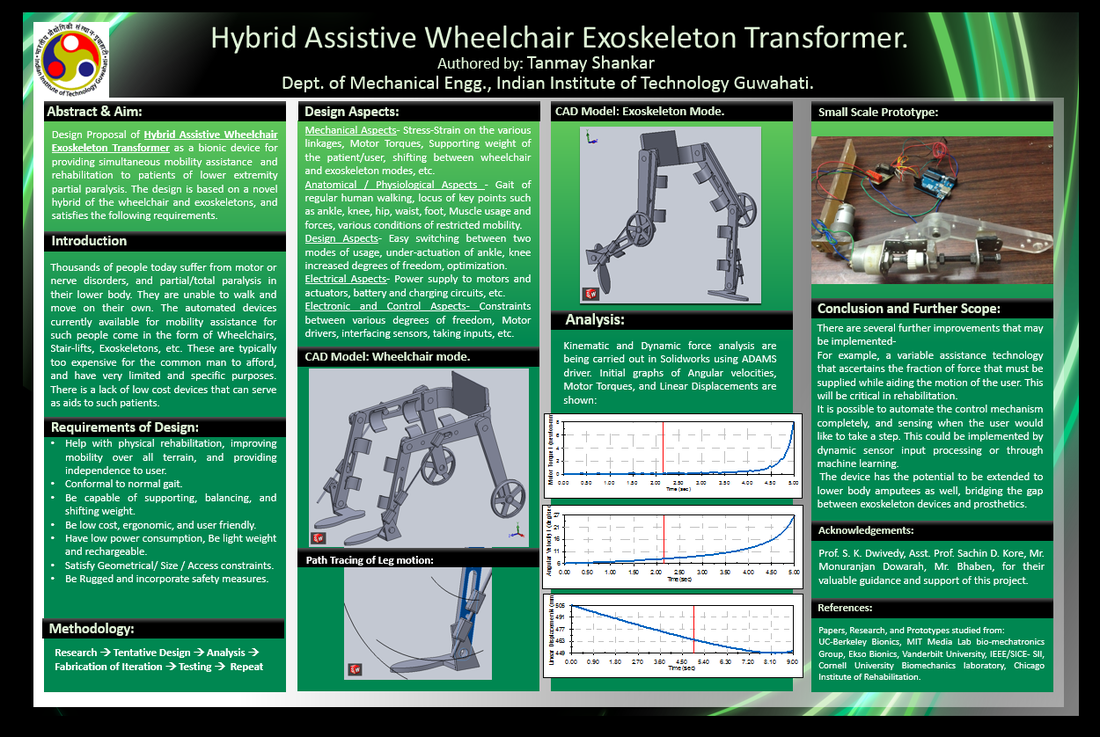
Hybrid Assistive Wheelchair Exoskeleton Transformer is a bionic device for providing simultaneous mobility assistance and rehabilitation to patients of lower extremity partial paralysis, at a low cost. The design is based on a novel hybrid of a wheelchair and an exoskeleton.
I published two papers about HyAWET:
Here is a neat video summary about HyAWET:
- Tanmay Shankar and Santosh K. Dwivedy, "A Hybrid Assistive Wheelchair Exoskeleton.", 9th International Convention on Rehabilitation Engineering and Assistive Engineering - iCREATe 2015.
- Tanmay Shankar and Santosh K. Dwivedy, "Preliminary Design and Analysis of a Hybrid Rehabilitative Device." 59th Congress of the Indian Society of Theoretical and Applied Mechanics - ISTAM 2014
Here is a neat video summary about HyAWET:
Design.
The hybrid design of the device solves two major issues; namely the limited mobility of wheelchairs over unfavorable terrain, and the strain on the patient due to continuous usage of exoskeletons.
Some features of the design:
- Modified ball screw linkage to actuate the knee.
- Under-actuation of the ankle linkage by the same ball screw.
- Single motor system to power the exoskeleton and the driving wheel.
|
Modelling. To the right is the planar linkage model corresponding to the CAD model. Lengths L1, L2, and L3 are configured according to the particular user. Once the von Mises stress analysis and displacement-strain analysis are carried out (in Solidworks), the other link dimensions are fixed. |
|
|
|
Analysis.
Kinematic principles are then applied to achieve ideal linkage parameters (x1, x2, a1, a2, etc.) involved. Kinematic equations (1) to (7) give x as a parameterized function, providing the angular displacement of the ball screw motor, as shown to the left. The corresponding angular velocities of the ankle linkage in the thigh linkage frame are also plotted. The torque graphs show usage of a ball screw mechanism to actuate the knee joint actively reduces the required torque. |
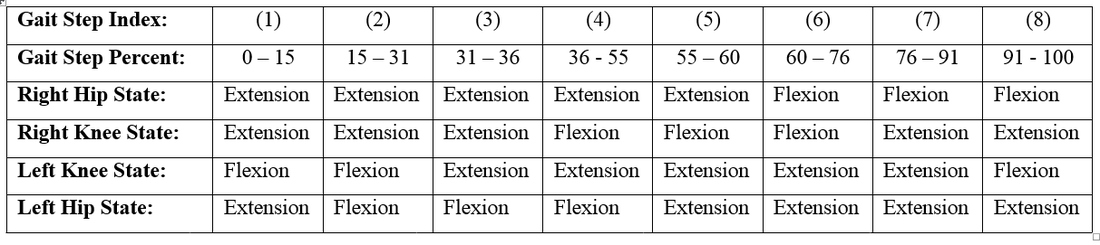
Gait cycle of able-bodied humans is split into several time indexed steps. Key points of human gaits are retrieved by defining the states of right and left hip and knee joints as extension or flexion. Open loop control may be implemented to accept commands from an experience trainer, and feedback may be accepted from strain gauges on the device, and tactile sensors on the user’s leg, to determine user comfort.
This poster on HyAWET won the best poster award at Seismech, the annual departmental symposium of the Mechanical Engineering Department of the Indian Institute of Technology Guwahati.