Research Interests
My research interests lie in the intersection of robotics and machine learning. More specifically, I am interested in connecting the structure prevalent in classical model-based robotics, such as value iteration, graph search planning, or analytical dynamics models in control, and the recent advances in deep reinforcement learning. A question that I'm particularly excited by is -"How do we develop algorithms that integrate the traditional structure of tasks, planning, and control into learning in a natural manner?"
Here is a formal research statement.
Here is a formal research statement.
Research Overview
I've worked on a bunch of cool research projects and internships, listed below! Don't forget to visit the individual project pages, by clicking on the project titles. All of my code is on my github profile. You can also find some cool videos about my research on my YouTube channel!
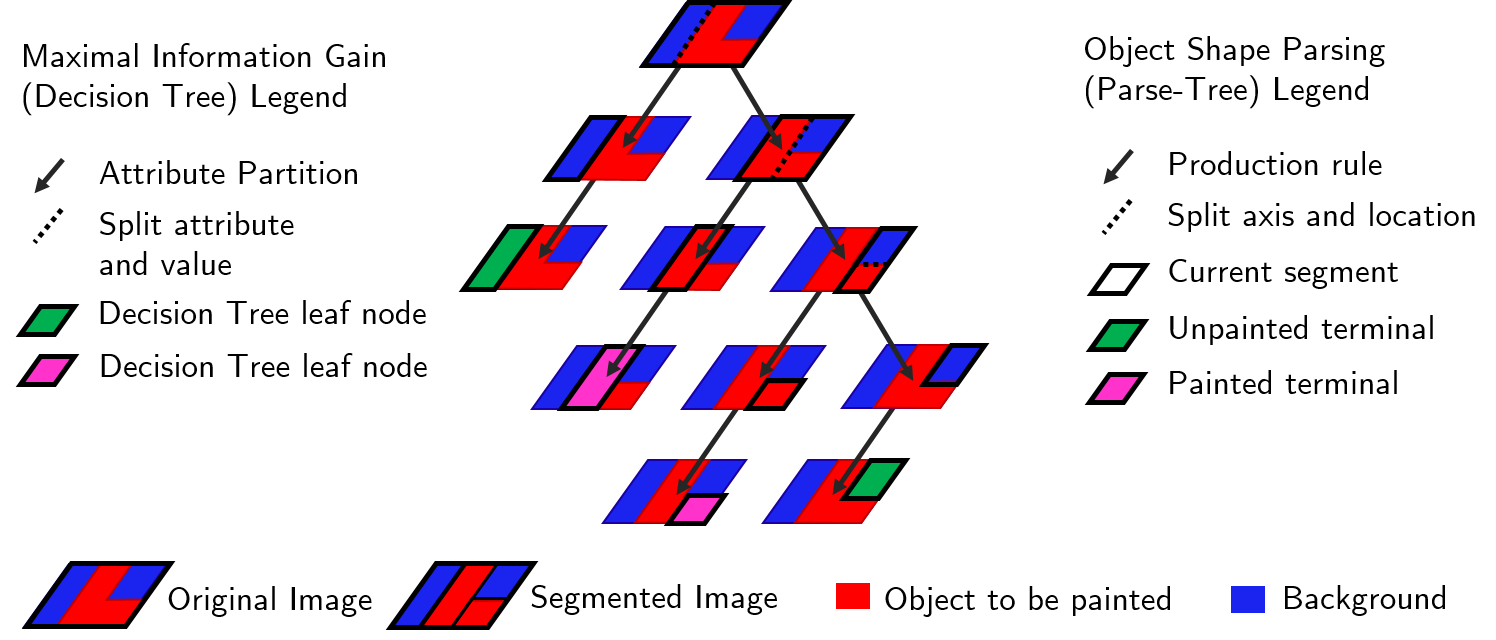
My master's thesis at CMU addresses the problem of parsing images via imitation and reinforcement learning. I explored how deep reinforcement learning and imitation learning agents can learn to invoke shape-grammars to spatially decompose a given task (i.e. parsing an image), and choose an appropriate sequence of primitive behaviors (i.e. paint strokes), to apply over each of the resultant sub-tasks (i.e. the resultant segments).
Reinforcement Learning Networks |
IIT Guwahati
|
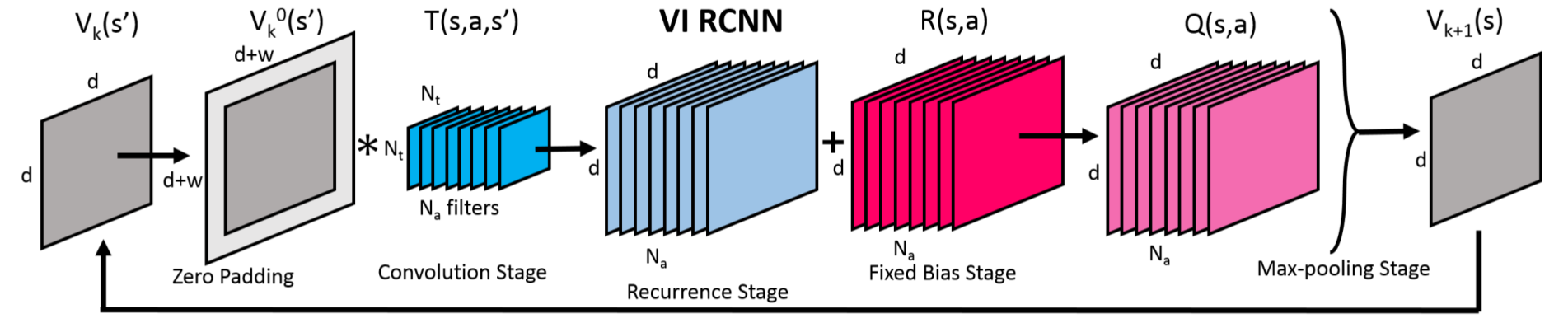
During my Bachelors' thesis, I worked on connecting Reinforcement Learning and Deep Learning in a natural way. I built a differentiable approximation to value iteration in the forward pass of a recurrent convolutional network. I also constructed an analogous differentiable version of Bayesian belief propagation, giving rise to the QMDP Network, a learnable approximation to planning under partial observability.
Semantic Context based Active Robot Exploration |
IIT Guwahati
|
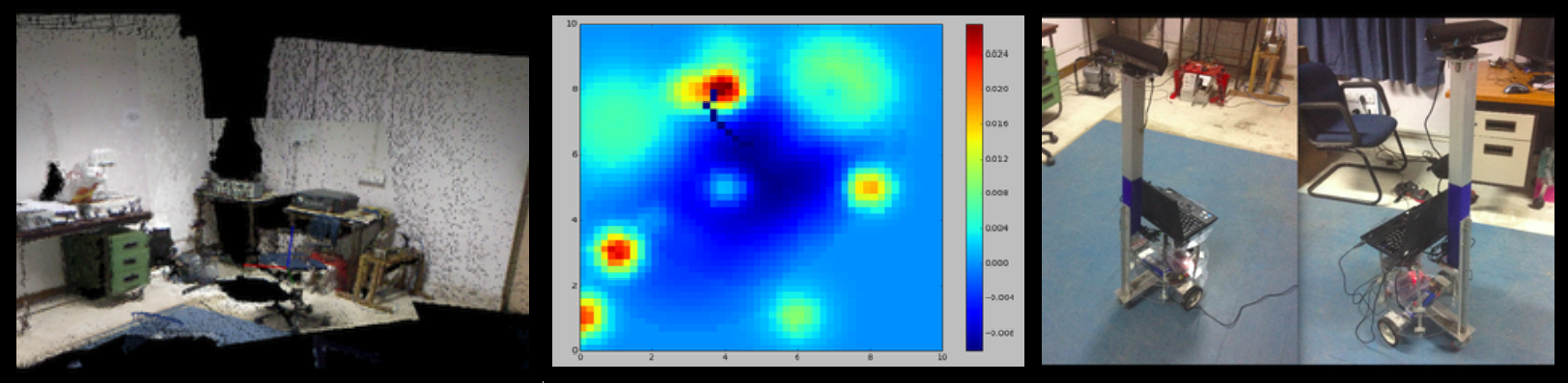
During my senior year at IIT Guwahati, I worked on Semantic Context based Active Robot Exploration (SAREx). SAREx is intended to infuse a robot with the knowledge that a human has of the scene, by combining Semantic Scene Understanding techniques with human demonstrations of suitably intelligent decisions in the environment, using Inverse Reinforcement Learning.
My work at the Stanford Intelligent Systems Lab at Stanford's AeroAstro department, with Prof. Mykel Kochenderfer, was on a vision-based collision avoidance system for cooperative UAVs, formulated as a POMDP. I set up Visual SLAM across multiple UAVs, and enabled the UAVs to execute cooperative tasks together. Our paper on the vision based collision avoidance system was accepted at AIAA AVIATION 2016.

My work at the Biorobotics Lab at Carnegie Mellon University's Robotics Institute with Prof. Howie Choset, was on an Interior Wing Assembly Mobile Platform- a robot for automating assembly of aircraft wings. My contribution was towards monocular vision and 3D CAD model-based localization in known environments, using both hierarchical image tree and ray-tracing edge approaches.

Hybrid Assistive Wheelchair Exoskeleton Transformer |
IIT Guwahati
|
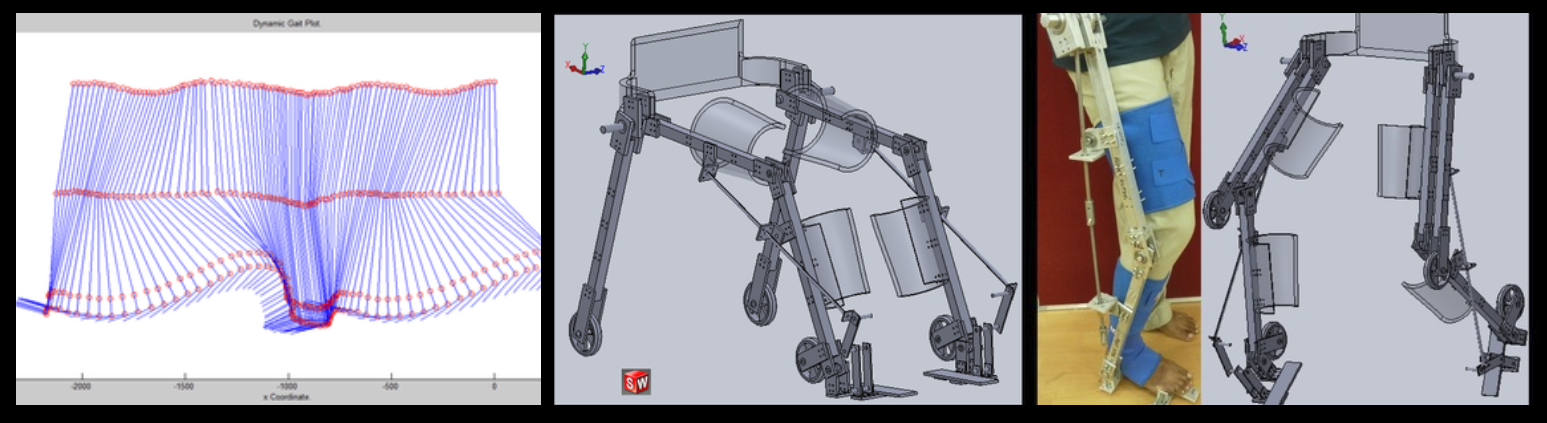
I came up with the idea of a robotic exoskeleton-wheelchair hybrid (HyAWET), to aid physical mobility of muscle weakness patients. In its exoskeleton mode, the device would help users walk; and in its wheelchair mode, the device would provide mobility over long distances. I worked on the hybrid design, a novel stability and the gait generation mechanism, and published my work at iCREATe 2015 and ISTAM 2014.
Intelligent Vision System for Blind Enablement |
IIT Guwahati
|
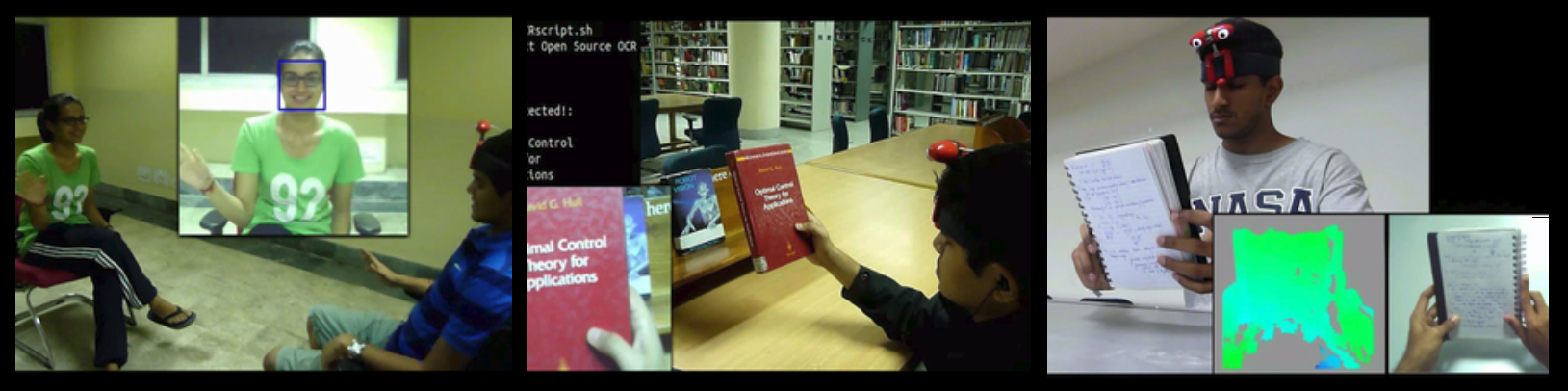
Two fellow students and I developed an intelligent vision system for assisting blind individuals (INVISYBLE) with daily tasks. Two fellow students and I developed a wearable stereo vision device, capable of guiding the user's hand to search for and manipulate objects, face recognition from the user's Facebook friends, text detection, and optical character recognition for reading large signboards. We published our work at iCREATe 2015.
During my time at the Biorobotics Lab at Carnegie Mellon University's Robotics Institute with Prof. Howie Choset, I also contributed to the pole climbing behavior for the lab's snake robots, using cylinder segmentation algorithms of the Point Cloud Library with structured light sensors to detect poles, and optimized the snakes' sidewinding path to the pole.

The majority of rural Indian farmers operate on a small scale, by tedious manual labour. To alleviate this problem, I designed a bicycle based crop harvester, aimed at extending the common bicycle to cut and thresh crops. The mechanism has a blade periodically cutting down crops for harvesting, as the bicycle moves. The entire process is powered by the pedalling the bicycle.



Photos
Here are some nice photos of each of my projects!
